Today’s manufacturers of robotic prosthetics have made great and advanced inroads into the concept of replacement limbs. In many instances, the latter have created them to an extent when they now not only look realistic, but can actually be made to react in a natural and lifelike fashion.
What Are Bio Sensors and How They Work
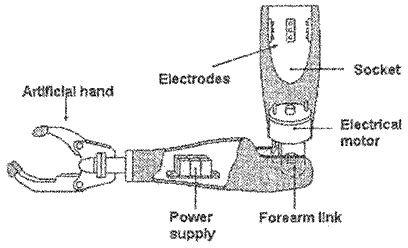
Important components used in the structure of robotic prosthetics are known as “bio-sensors ” or “controllers.”
Their compilation consists of various parts that integrate with the body’s natural functions. This remarkable innovation is able to detect signals from either the muscular or nervous systems. In this manner, the actual device is activated, monitored and controlled. From this routine, an “actuator” copies the action of a muscle, thereby enabling an enforced movement to be made.
For the detection of electrical activity, a system of wires is incorporated into the surface of the skin. Added to this are needle electrodes , which are actually implanted within the muscle. An alternative method is used, with solid state electrode-arrays, with “nerves” growing through them. One of these particular methods is utilized in the field of “myoelectric prosthesis”.
Robotic Hands
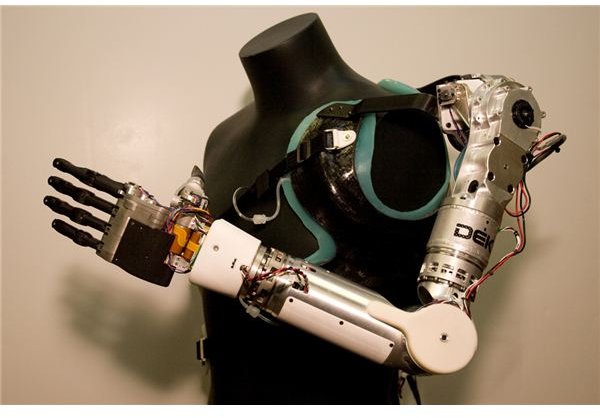
Under-actuated robotic hands are capable of grasping a variety of shapes. This is enabled by their mechanical ability and the material from which they are manufactured, which is extremely light-weight. This permits their use to be easy and natural, thus rendering them ideal as replacements for hands.
A tribute to the development of robotic prosthetics, are “tendon driven hands”, where three phalanges are linked together with joints that are cylindrical in shape. The use of a mechanical device is made for the movement of these “fingers” to give the hand a natural method of closing and appearance. Each of the “fingers” has its own actuator, allowing it three degrees of mobility, with a fourth degree being added to the thumb. This is created by a mechanical differential being added to the thumb, thus enabling the hand to grasp the object.
Contant Development
Robotic engineers are striving for new and ever more natural appearance in the field of robotic prosthetics. They are continuously seeking prosthetic improvements to provide patients with a better, subtle mobility and feelings with their prosthetics replacements. This is supported by a very exciting advance scientifically. Biotechnicians have recently invented a skin that can sense touch and even feel warm to when touched.
Innovative Materials
This skin onsists of a combination of silicon and germanium, which is rolled onto an adhesive type polyamide film. From there, it is put in layers on a “nano-scale” layer of transistors and pressure sensitive high technical rubber. When tested in the laboratory, the response was found to be similar to that of human skin. There is, of course, a long way to go for the perfection of these materials, but they do now have a basis from which to work.
Robotic Feet
Robotic feet may be made as a single flat foot or as a foot with multi-segments which is a far more complicated body part, but which
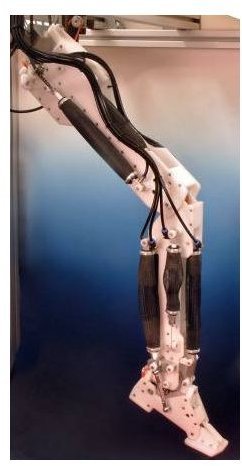
enables the user to walk in a more natural manner. Sometimes the foot necessitates being built up to be in line with its corresponding leg.
Other robotic feet and knee-high legs allow disabled sports persons to continue participating. This is particularly ideal for athletic sports, such as running and hurdles, as it gives the patient a whole new lease on life and interest in doing something that they really enjoy.
Referemces and Image Credits
https://news.discovery.com/tech/five-major-advances-robotic-prosthetics.html
https://robot.gmc.ulaval.ca/en/research/theme307.html
https://www.astahost.com/info.php/Robotic-Prosthetics _t3044.html
https://www.geekwithlaptop.com/breakthrough-in-electronic-skin-for-robots
Image Credits:
https://www.rehab.research.va.gov/jour/98/35/3/bonivento.htm

